

游標插補細分為線性位移測量系統和旋轉編碼器提供了優秀的差分線性和更高的解析度
混合信號亞微米CMOS技術提供了高性能的片上系統設計。隨著感測器(光電二極體或者霍爾元件)的集成,提高了位置傳感靈敏度。
模擬正弦信號插補細分已經變成了一個技術標準,線性位移系統能夠到達小於1微米的解析度。如果在這些交錯間隔反復應用這個原理,就會得到更加精確的測量結果。
這種方法的基本原理來自遊標卡尺,這種插補細分使用了集成游標設計。無論測量尺是磁的或者光的,或者是粗略的還是精細的,計算原理是相同的。這個游標掃描過程是完全模擬的,並且發生在一個超社區域內。這個方法提供了替代既定的線性和旋轉位置的傳感方法。
一種細分編碼器
由比較主尺和游標細分尺,電子感測器可以得到精確的讀數,不需要連續掃描多個數字軌道。例如,iC-Haus的插補細分電路iC-MN(圖1)可以評估一個或者兩個附加到主尺的游標尺並且聯合這些讀數形成位置數據。
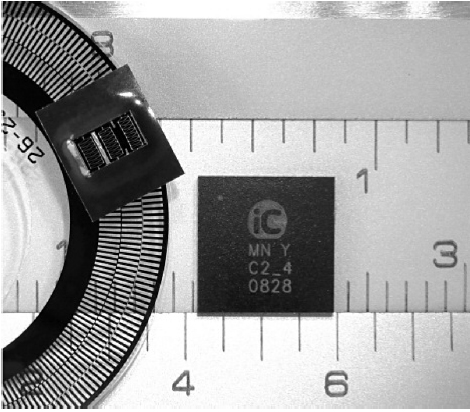
圖1:光學游標系統用於三個信號軌道插補細分
對於iC-MN,插補細分電路定義絕對角度位置是利用三個正弦信號的相移。這種方法比僅使用兩個尺規對系統要求的精度較低,較容易實現。
主軌道a1決定著細分解析度和系統絕對精度,游標軌道a3和段軌道a2產生的資訊用來決定間隔(圖2和圖3)。一步一步的計算步進時信號錯誤允許的公差。採用這種方法可以製造小尺寸的測量尺和編碼器機構,並且這種靈活性可以用於較小的感測器。信號的頻率也降低了,因此,通過模擬電路元件的不同相移延時的低通特性可以忽略,無需使用低通濾波器。
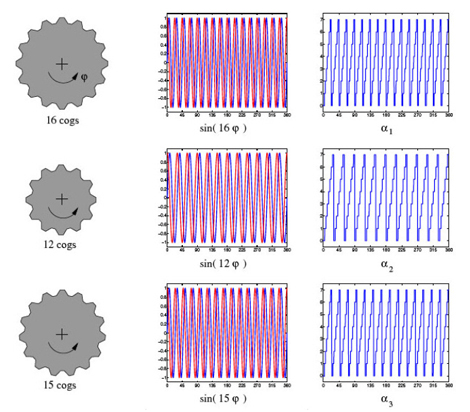
圖2:三正弦/余弦輸入信號分別數位化(相位角a1,a2和a3)
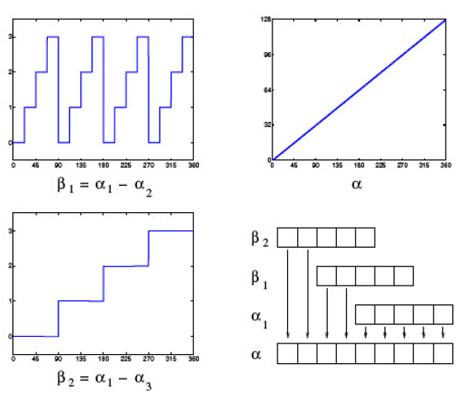
圖3:以a1提供的細分解析度從相移a1和a2計算出角度a3
晶片功能
iC-MN的每個通道有一個可調節的信號調理單元和一個採用保持電路,採樣保持電路保持調理過的模擬信號用於順序的數位化。為了達到這個目的,此單元包括一個高精度SAR ADC,
帶8-13位可調節解析度的插補細分器。
在模擬電路,信號偏置電壓為校準提供一個參考。此單元也評估信號幅度,如果需要,感測器提供能量給這個軌道。這意味著在室溫下調理的參數設置仍然在整個工作溫度範圍內有效。
非線性ADC使用正切函數同時分析正弦和余弦。這用來預防ADC來自細分頻率依賴由於速率錯誤引起的角度錯誤。
為了計算高解析度角度位置,可以配置兩個乃至三個軌道游標計算,這使得解析度高25位(360度;一周內解析度達0.04 弧度秒)。
iC-MN為7х7mm QFN48封裝,需要注意連接線終端防止極性接反和錯誤連接,包括RS-422收發器串行數據介面。數據輸出是SSI協議或者BiSS協議,BiSS時鐘速率可達10Mbps。
使用這個器件可以監控所有的晶片主要功能和配置報警給指定功能。系統會識別典型的感測器錯誤,例如由於信號線斷開引起的信號丟失,短路,髒汙或者老化,並且通知控制器。
光學編碼器
絕對值光學編碼器使用精密的尺規,使用微結構應用於玻璃基片。此器件得益於系統級片上集成解決方案和元件尺寸。除了執行多軌道數字掃描以外此編碼器還細分模擬信號來產生中間值。
光學編碼器使用光束穿透模式,使用LED作為光源,碼盤上面有一定數量的碼道,感測器為光敏感性IC。此感測器結合光電探測器,信號調理單元和插補細分電路在一個單晶片系統。
使用一個高數量的均勻間隔圍繞分佈在碼盤的圓周,標準工藝可以達到非常高的精細解析度。例如,片上系統iC-LG位置感測器,初始化分達到2048個相等間隔每圈。碼盤直徑為42mm,碼道寬度大概27um。
為了維持單圈絕對位置,此感測器必須區分出每個間隔。為了達到這個目的,碼盤具有高達13個附加的碼道,它以數字絕對碼的形式提供了清晰的間隔資訊。
此感測器會通過插補細分這些週期的間隔來更進一步完善這個位置數據。在這裏,每一個間隔提供了一個正弦和一個余弦信號。通過計算正切函數,感測器可以確定一個間隔內實際的相角。這可以補償數字絕對代碼的不利因素來獲得更細微的絕對位置資訊,相應解析度高達21位。
游標的竅門
為了達到精細的基本解析度,基於游標的計算也可以區分這些週期的間隔。為了達到這個目的,這個方法使用額外的正弦信號取代數字絕對碼。對於測量尺規,3個軌道足以替代12個。目前的感測器,LED以及鏡頭都適合設計成非常小的元件,這些小尺寸的元件開闢了新的應用。
同時,有效的光電感測器陣列,例如iC-LSH,提供高保真的無滯後和低失真正弦信號。這允許精密細分以便游標計算能基於較少的週期間隔(圖4)。
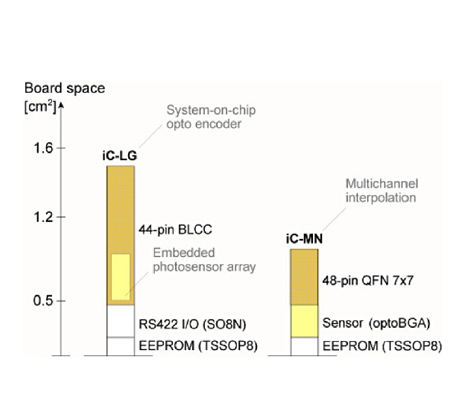
圖4:游標編碼器空間縮小一半
角度誤差
為了達到較好的細分,確認相關信號錯誤和補償這些信號是非常重要的。典型的錯誤源包括由偏置引起的感測器阻塞(OS和OC);感測器正弦和余弦信號的靈敏度不一致(幅度AS和AC);正弦和余弦信號之間的相移偏離90度;(ΦSERR 和/或ΦCERR)以及感測器的非線性特徵曲線(正弦和/或余弦曲線的形狀偏差)。在測量尺規或者光柵也有誤差,例如每個週期間隔的寬度波動導致正弦和/或余弦信號的週期會不同。通常這個角度由一個週期間隔的反正切正弦和余弦信號相關的商依照等式1計算出:
插補細分電路量化這個角度,細分這個週期間隔使得編碼器的位置解析度超過每旋轉20位是可行的。
一個短的波動角度錯誤是在一個週期間隔內的錯誤。依賴於週期間隔的數量,此錯誤對角度測量絕對精度有不同程度的影響。
一個長的波動角度錯誤隨著軸每旋轉一周而重複。調整碼盤通常會引起這種類型的錯誤。測量尺規的精度也是一個決定性的影響因素。編碼器軸的裝配也可能引起整個系統的角度錯誤(例如,裝配偏離中心以及軸和軸承受力過大)。
對於光編碼器(iC-LG,2048個週期間隔),整個一圈(360度)的絕對錯誤<0.014°(50弧度秒),對於2048個週期間隔,整個旋轉一周(360°)電子累加角度錯誤為28°(0.014×2048)。插補細分電路可以提高10倍的精度,電子精度可以達到2.8度。
為了補償較低解析度的測量尺規的信號,對插補細分電路要求就更高。信號調理也是一個重要的因素。它必須精細的矯正波形。
感測器信號諧波分量也是一個影響插補細分結果的因素,因為它會減小角度的精度。現在製造的光電感測器陣列總諧波失真低於0.4%(使用256個週期間隔),然而,已經是一個主要的錯誤來源。
概要
幸虧有游標插補細分技術,使用此技術的編碼器使得測量系統的整體性能可以達到更高的精度以及使用優良的差分精度為數字化的電機回饋系統提供更高的解析度。
一個相對較小的光學感測器僅僅由幾個少數的信號相位關係足以掃描位置資訊。使用此技術做編碼器可以使用簡單的光源,較低的功耗,和節省空間。這反過來又降低了系統成本和開闢了新的應用。

