



��������
����ֵ��������ƣ���ѡ�ű��������ǹ�ѧ��������
��λ�ñ������ĽǶȷֱ��ʺ;�ȷ���뾶��Ĵ���ɨ������������������йأ������ڿ��еIJ岹ϸ����Ⱥ���Ч�Ĵų�������ͨ��ÿ��תɨ�����������ڣ���ѧλ�ñ��������и��ߵķֱ��ʡ����ʹ�ô����̣����ַ���Ҳ�����ڴű�����ϵͳ�������ĸ�ϵͳ���ã�
���������ź�ѧ��оƬ�������Ĺؼ�������Ȩ�����ֽ�������ͱȽ����ֱ��������������ﵽѡ����Ʒ�����Ŀ�ġ�
Ŀ¼
����
���ִ�����������ϵͳ
����Ӧ��
�Ƚ�������ת������Ӧ��ϵͳ
4.1��װ�乫��Ͳ�������
4.2�����ܵ������Դ
5. ���ۣ��ĸ����ã�
1������
���ľ���λ�ô�������������������������Լ��ߴ��С���ͳɱ��йأ���������������������õ�ѡ�����ҵ����е�һ��ǡ����ϵͳ�����������Ӧ��ͷ��������Ҫ����������Ǻ�ʱ�ģ����ڲ����Ǵ������Ļ�е�ṹ������ÿ��û��������Ԫ���������ĵIJ���ҲҪ���ǽ��������⣬�������ɴ�����оƬ�������һ�������IJ���װ�ã������ṩ���ʿ��ܵ�ƥ�䡣
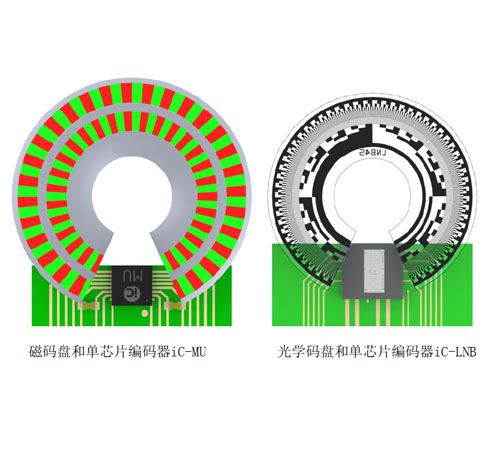
��ѧɨ����ͨ��ʹ�õ�����װ������Թ����������н��м����ġ�Ȼ�������ڴŵĻ��������������пɱȵ���Чѡ�Ϊ�˲��ò��ṩһ�����ʵĴ�����������оƬ�ڲ������߲���������������оƬ���־���������ָ�ꡣС�����γߴ���������ͨ���������ֽ��������������ս�Ե����Ŀ�ꡣ���ıȽ�һ��16�ܽ�DFN��װ��18λ�ŵ�оƬ����������iC-MU��һ��optoQFN��װ��18λ��ѧ������iC-LNB��
2�����ִ���������ϵͳ
��ͨ�������ɨ����iC-LNB�������λ��������������λ�Ʋ���ϵͳ������ת��������ͼ1����ͬ��ɨ��һ��10λ�������룬����һ��ģ����źŹ����������ʵʱ�IJ岹ϸ�֣�ʹ��һ��С�ı��������ﵽ�ߵĽǶȷֱ��ʡ������õ��ľ���ֵλ�ú�����λ�÷ֱ���ʹ���ڲ��ġ�FlexCount���㷨�ó����ṩ1��65536��Χ���������������ķֱ��ʹ�ѡ��.
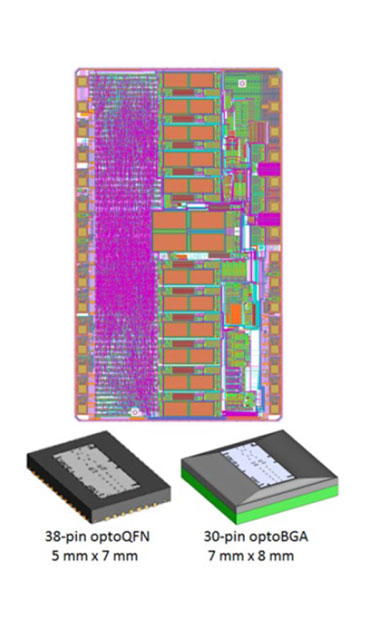
ͼ1.��ɨ����iC-LNB
���봰�ڿ��Ƚ�5.2mm��֧��ʹ�ý�С�����̻��߽ϴ�ֱ���Ŀ����ᡣ�����Ž��ܵ�iC-SN85 LED������һ�����յĹ�Դ��iC-LNB�ļ��������Լ������նȵļ��𡣹ؼ���������Ҳ��iC-LNB�ڲ�ִ�У��������ӵ�����Ҳ����һ���ⲿ��������ִ�С�
ƫ�úͷ��Ȳ��������ѱ����ɵ�оƬ�ڲ�����������ģ�����źţ���Щ�ź�Ҳ�ɲ�ֵ�1024�����ڵ����Һ������ź�ͨ���ĸ�����˿���������źŽ�����·�����Ͳ岹ϸ�ֵ�����ø��ߵ�λ�����ݾ��ȡ�
λ��������������Dz��еģ��ߴ�16λ�������Ǵ��еģ�ʹ��һ��������λ�Ĵ�������ʱ�����ʸߴ�16MHz������ѭ������ʱ��С��1us��3.3V���ݵ�SPI�˿�֧���������ú�����ɨ��λ�������Լ������Ϣ�����磬����żУ��λ���洢���ӱ�־һ��������������ٶ������ڷֱ��ʣ���17λ�ֱ���ʱ�ɻ��6000rpm����1����
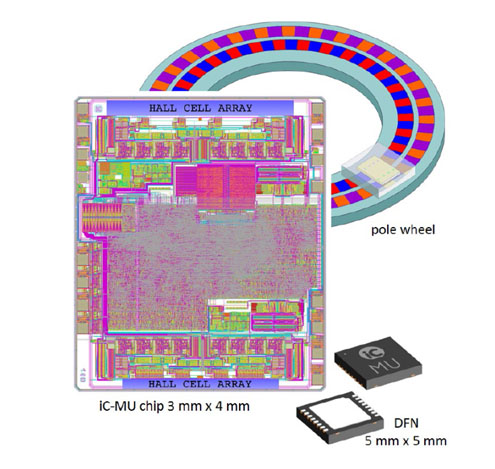
����������iC-MU��һ��ȫ���ɵĵ�оƬ������������Ĵ����̡��ŹĺʹŴ�ɨ�������������˿ؿ���Ӧ�á�����Ӧ�ð�������λ�ñ������������������Լ�������ˢ����Ļ����������ͼ2����λ�����ݱ�ʵʱ�����ɴ��нӿڣ�BiSS,SSI�Լ�SPI����һ�������ӿ���ͬʱ��������������ķֱ�������������ʹ���ڲ���FlexCount���㷨�ٴ�ѡ��
���ú��ʵĴŲ��������������������������������Լ1.28mm��ÿ���ż����Dz�ֵģ�����һ���ż��Խ��洩���������������ͬ��������-����ת�����������ֻ������������źţ���Щʸ������ת�������ٴų��仯�ʴ�8 MSPS������ʱ��
����������ź�֮�����λ����ɵ���Ĥ-�ѱ���źŴ������������λ�û����α�ԭ����ʹ�����ԭ�����˶����Ʋ���Ҫ��þ���λ�á�����תӦ���У��ɻ��һ��19λ�ķֱ��ʣ��൱��2.5�����룩����ʹ�ô����� MU2S 30-32ʱ���Լ�֧�ֵ��ٶȸߴ�12000 rpm��
ͨ�����Ŵż�����һ���߷��Ӵ��������һ����ƽ���̣��ɽ���һ�����յ�ϵͳ�������������ֱ�Ӱ�װ������ķ����ϡ�ɨ�蹤��������оƬƽ���Լ0.4mm��
�����һ��16�ŵ�DFN��װ��iC-MU����ȫ���������������������С���ܵĿռ䣬��5*5mm��ƫ�Ļ���ƫ�����֧�ֿ��������ڸ߷ֱ��ʵĴž���ֵ���������ʺϵĴ�����ֱ��Ϊ30mm��֧�ֿ�����ֱ���ߴ�10mm��
ͨ������ϸ��������1��65536�����ֽǶ�λ�ÿ��Դ�ABZ�ӿ����κηֱ�������������ڲ��ġ�FlexCount���㷨��������Χ�ķֱ��ʲ�����ʹ��һֻ�������Ϳ������㡣������һ������ʺϸ��ֱ������ֱ��ʶ�����ı����װ�á���ȫ��װ�ñ�������λ���Ժ�Ҳ���Ա�̣������ٵ�ʱ�佻�����С����ң���λ���ź�Ҳ������װ����Ժ��ٱ�̡�
iC-MU���Բ���3�������źţ�U��V��W������ת��ˢֱ��������ʺϵ�����Դ�1��16�����ھ�ȷ�ĵ��ӵ���UVW�źſ�����ת�ӵ�λ�øı���ṩ��һ���ؼ������ƣ�ʹ�ò�����Ҫͨ��ʹ�õĻ�������ϵͳ��
���ڿ���֧�ֿ�����Ӧ�ã�����ʹ��һ�����ݵ�װ���滻��ת��ѹ������Ϊ����ϵͳ��һ���֣��⽫����һ�������˵���ת��ѹ���滻��������������������ĸ߷ֱ��ʣ�֧�ָ���ȷ�ĵ�����ơ�
SPI�ӿڿ���ֱ�����ӵ�һ����������BiSS����˫��ͨ�ź�CRCУ��ij�������ͨ�ţ��Լ�SSI��һ�����ı������ӿڡ����еĽӿ�����ʱ��Ƶ�ʸߴ�10MHz��
�����������룬iC-MU��BiSSЭ����֧�ֶ�ӻ�Ӧ����ʽ���ӣ�ʹ��ͬ��ʱ�����Ӷ�����������������ݡ����һ����ر����������Ӳ����úͿ�ʼ���������Ծ����п���������ٶ�ʱ��¼�������Լ���һ��������У���������������������ϵͳ�е���һ������������ӿڡ�
3������Ӧ��
iC-MU֧��40��80������
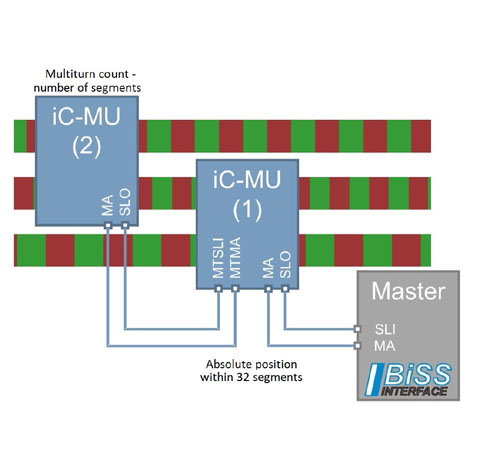
ͼ3��Ԫ�������������Բ���ϵͳ�ʹ������Ӧ��
���磬����ͼ3�Ķ�Ȧ��ƾ���λ�ò����������м�����1024��ѭ������������1023��ѭ������λ���ɺ������2.6�IJ������Ⱦ�������������iC-MU(1)���м�����1024��ѭ������������992��ѭ��֮�������λ���װ������ظ�����32��λ�����ݣ���������������ȡ� ��Ȧ����������iC-MU��2��������������32���Ρ�
���⣬��������iC-MU������������������Ȧ�������������䣩Ҳ���������ṩ���Ķ�Ȧ���ݸ�iC-MU��һ��������Դ����Ȧ�����Զ���ȡ�������ڼ���ģʽ�ڼ������Լ�顣
4���Ƚ�������ת������Ӧ��ϵͳ
���ֱ������Ĵ������ṹ�Ѿ�ȷ����֧��С�ߴ�ͳɱ����еIJ�Ʒ��û�������κβ������ȣ�ͼ4���������������������ò�ͬ�ĵ�·��Ʒ���������ͬ�����Ƶ��������ԣ���1����֧������ɱ����������ʵʱ�߾���ֵ�������źŷֱ��ʡ�
ͼ4��װ��ԭ���ͳߴ�Ƚ�
��ѡ�������ϵͳ����ʱ������������Ҳ���뿼�ǽ�ȥ������Ӧ������Ͳ�������Ҫ��2�Ƚ�����Ҫ�Ĵ�������������
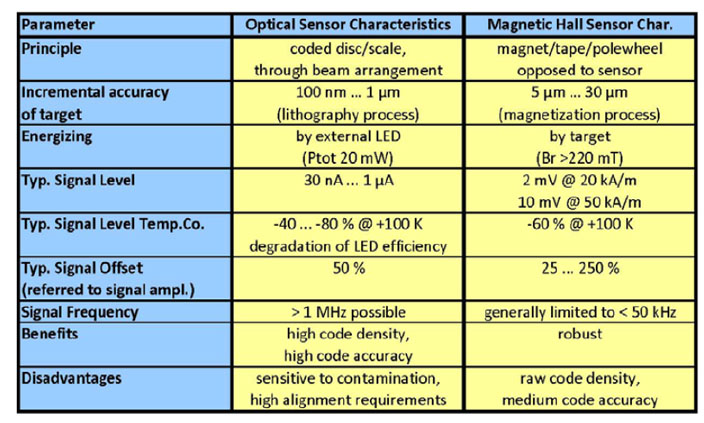
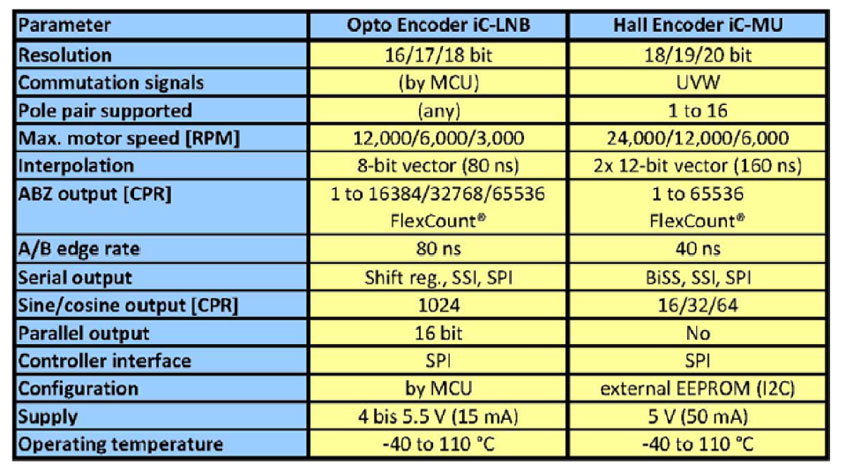
��2����ʹŴ������������Ƚ�
���������ĵ��Ӵ�������ϵͳ�������̵Ĵż��������Ǿ��Բ�������������Դ�����磬һ�����͵Ĵž�����15um������ѧ���̵��߾�����300nm��������Զ����ġ�������ɨ��뾶����3�������ֵ���Ա�ת���ɽǶ����������ϣ��ű�����ϵͳ��ԼΪ0.07����252�����룩�Լ��������ϵͳ��ԼΪ0.0018����6.4�����룩����ѧϵͳ��������Ҫ�����Դ�ܼ�Ϊ0.011����40�����룩��
�û�ѡ��һ���ض���ϵͳ��Ҫ�������ϵͳ���ŵ��ȱ�㡣���磬�ű�����ϵͳ���ж������ƵĻ��������������磬�ҳ��������Լ�ˮ������Ҳ����һ�����Ĺ������룬���������϶�Ͱ�װ����ϴ������װ�䡣���ڴű�����ϵͳ����LED��ѧ������һ����ƽ�ı�������Ƴ�Ϊ���ܣ�
����оƬ����ߣ���������·ʱ���������źŰ�����һ����Ҫ�Ľ�ɫ����ѧ��������ȡ����ɹ�ѧ���̲����Ĺ�ֲ���ǿ�Ⱦ������õ��źŶԱȶȱ������������Ϊ��սʤ���������ı�����LED�ṩ�����Ե�ƽ�й⣬iC-SN85��һ�����ʵ�LED����֧�ִ�Լ200nA�Ĺ�����������ڴ����迹Ϊ1M��ʱ�������źŵ�ѹΪ200mV��
���ڴŴ��������ų�������ֱ��оƬ������ġ�����ЧӦֱ���ṩһ�����͵�mV����ѹ�������ڴų�ǿ�ȷ���Z�����ڵ�������Ԫ�����ܸ�֪�������ľ��룬�����ö������Ԫ���ڲ�ͬλ�ü�¼�ų���Z�����Ա�Ƕ���Ϣ���ɸ����ֲ��Ĵų�����ó�����������Ԫ��������ʵ�ء���֪����������Ľ��������ߡ����ڻ�����ѹ�ļ��Ը���ų��ķ������ı������������ϼ���ʹ��ʹ��һ��������ȷ�����ԽǶȳ�Ϊ���ܡ�
����Ԫ�������ܴӴ����̵Ĵų�����10mV�ĵ�ѹ��Ϊ�˴ﵽ��ѧ������ϵͳ�ķֱ��ʣ��źŵĴ������뱻���ơ�Ϊ�˴ﵽ�źŵ�����Ŀ�ģ�����Ԫ��ʹ��һ���̶���ɨ��Ƶ�ʺ��˲����������������������������һ��ģ���ͨ��ɫ����ֹƵ�ʴ�Լ20kHz��Ȼ����ʵ���ϣ��ϳ����źŴ�����ʱ�Dz���صġ�
4.1��װ�乫��Ͳ�������
����ϵͳ��ʹ�ÿ���ʵʱ�岹ϸ�ֵ�·��������ת����ʹ��arc tangent����ת��������ƫ�á�����ƥ�䡢��λ���Ⱥ�г������ת����������ģ�������/���Ҵ������źš�Ȼ�����������װ��λ�õ�ƫ��������ź������С�岹ϸ�ֵľ��ȡ�Ϊ��ȷ���������ȣ�����ϵͳ��������̬У��װ��������ź�����ͨ�����ɵ�D/Aת����У�����ڼ���ģ���ź�·����
�����ź�У�������е����ƶȣ���3����iC-MUҲ��������/��������У����Ҳ�ܲ����������һ�����ú�У����ѡ��Ĺ��������Զ�������ά�֡����ڹ�ѧ�����������ɵ�LED���ʿ��Ʋ������¶����������LEDЧ����ʧ��������������һ���������������������������оƬ����ı仯ʱ����ij�ǿ�ı䡣
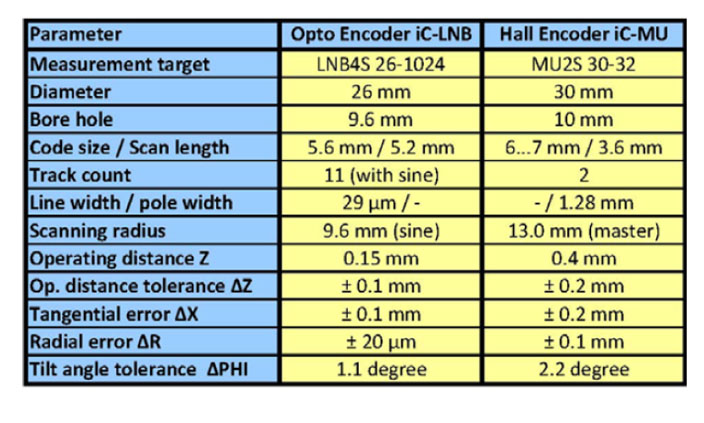
��3����е���ݺ�װ�乫��
4.2�����ܵ������Դ
ԭ���ϣ����Ӧ�ñ�ͨ�̿��ǽ�ȥ��������ѶԻ�����������˿��죬�û�����������Ϊһ�����ӡ���������ô�������ؼ��γߴ��ѱ����ǽ�ȥ����Щ������Ҳͬ�������ڹ�ѧ������ϵͳ��
���������������ɨ��뾶���벻���룬�������������ź�ʧ�档�����һ���뾶λ�ƣ���R��������Ԫ������̽��������̽��ֶεĴż�������ȷ��λ�ã�ͼ5B�������Һ������źžͻ���һ���̶���λ�����������ɨ���г��֡�Ȼ������Ҳ����ͨ��ʹ�ü��ɵ��ź�У����·�õ�������
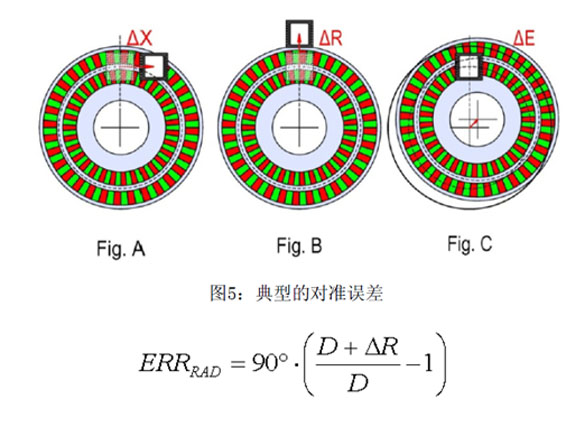
����ʽ1�����ھ��������IJ������
����ʽ1�����˴������źŵ�����λ��DΪɨ��ֱ������RΪɨ��λ�ơ����磬�ο��������������źţ�һ����������������0.1mmλ�ƻ����0.35°��������ɨ��ֱ��Ϊ26mmmʱ���������ÿ��ת�Ļ�е�Ƕ������������Լ�������һ������������32�����ԣ��൱�ڻ�е�Ƕ����Ϊ0.01°��
��һ���棬���������߷����λ�ƣ���X������������źŵ��ӽǶ����Ƶ�Ӱ�����С����ͬ�ģ�ͼ5A����������ı����λ���������Ӱ��������λ��ֵ��ʵ���ϼ�������ı䡣
Ȼ����ƫ��װ������E���������豸������ͼ5C����ֱ��ԽС������Ŀ��ĸı�Խ��һ�����������ֻ��С���Բ������ȡ�
����ʽ2����ƫ��������IJ������
ƫ������������ڲ���������λ����E����������������ת��Ͳ��������ļ���p����ˣ�һ��ƫ����10um��������λ���Ϊ1.4�����ο��������ڣ������߽Ƕ����0.05�����ο���е��ת�����йسߴ��С������3��ɨ��ֱ��26mm������1.28mm��32���ԡ���������������õ���λ���α���㣬ƫ������������һ����С��Ӱ�죬���������źŹ����ƫ��������ͬ�ġ�
��һ�������Ļ�е��ת360�����ǶȾ�ȷ������+/-0.1������������ܴŻ�ϵͳ�����ơ��������Ĵż��仯������λ��Ӱ���ڴ�Լ45����90������ͼ6��ʾ�����Ӳο��������Ļ�е��Ҳ����һ��������������ͨ����ͬһ��������ת��һ������ƫ��۲쵽��
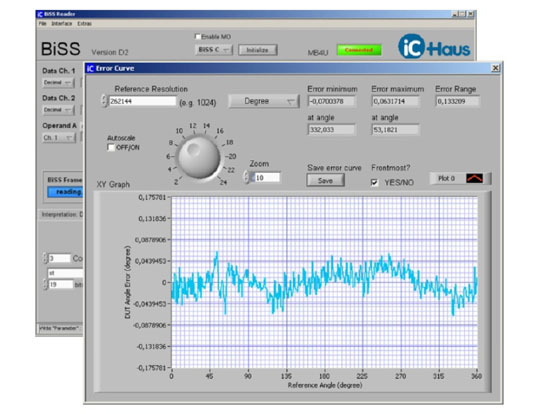
ͼ6��iC-MU��ϵͳ�ǶȾ���
ͼ6չʾ��iC-MU��ϵͳ�ĽǶȲ������ȣ�ʹ�ô����� MU2S 30-32�����ڽǶ�Ϊ11.25����
�������ѧ��ͼ�ι�����BiSS���������������ıȽϲ������ݡ�
5�����ۣ��ĸ����ã�
�Ŵ����������кܶ��ŵ��˵������Ŀɿ��ԡ��Գ�����ĸߵֿ��ԡ������顢�Իҳ���ˮ���������С���оƬ����������iC-MU����ʹ�ÿ������Լ���ʵ�ֽ��й����������������λ�÷ֱ��ʡ�Ȼ�������ڸ߲������ȵ�Ӧ�ã���ѧ������������iC-LNB�������ƣ�������Ҫ�������װ��ɱ������ǣ����ǵ����Ǿ���С��optoQFN��optoBGA��װ����оƬ��������һ�����е�ѡ������Щ�ؼ��㣬����ѡ����һ������Ӧ����Ӧ�ñ�����������������
