



��������
��ѧ���Dz����������㷺���ڸ���Ӧ���У��Ѿ���Ϊһ��ʵ�����Ӵ�������̽������
�����Ӧ�ã������������������е��Զ�ˮ��ͷ���ֲ�̽���������ܹ���������ֲڶȻ��ȱ仯�ĸ߾����豸����ѧ���Dz�����һ����ԭ�������Ը���Ӧ��Ҫ����в�ͬ����ơ�
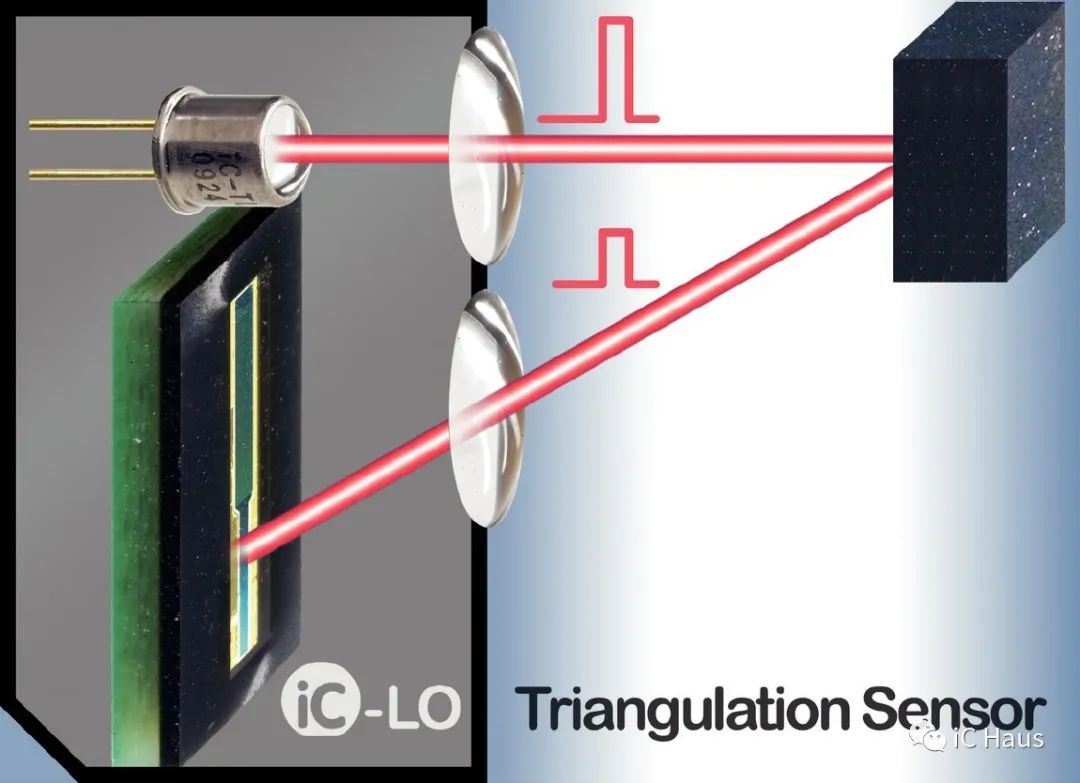
���Dz����������ļ�ͼʾ������ʾ��
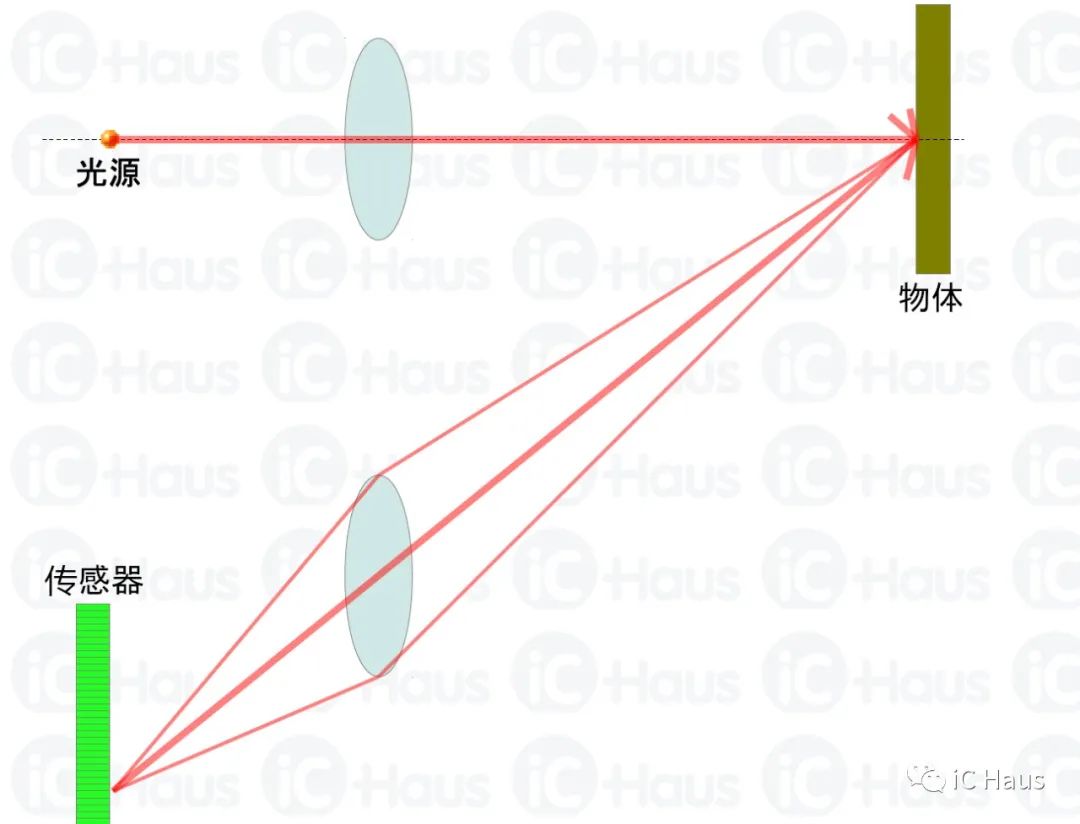
���Dz���ϵͳ�������ɹ�Դ��LED �⣩����ѧ��������ͨ���� PSD �� CMOS ���Դ��������Լ�����֮��Ĺ�ѧԪ���������˹�Ƭ�ȣ���ɡ����������Ƿ���ڼ�����룬���յ��Ĺ����������ѧ�������IJ�ͬλ�á�ͨ���������������չ��λ�ã����ǿ��Լ��������ľ��롣
���������Ծ��м��ɵ��źŴ�����·�����߿���ʹ���ⲿ���������д����������������Ը�����Ҫ������Դ��
iC-Haus Ϊ��Ӧ���ṩ��ͬ��оƬ���������ڷ���ˣ�Ҳ�����ڽ��նˡ�
���Ľ��ص���ܽ��նˣ�����������������˽��ں����������н��ܡ�
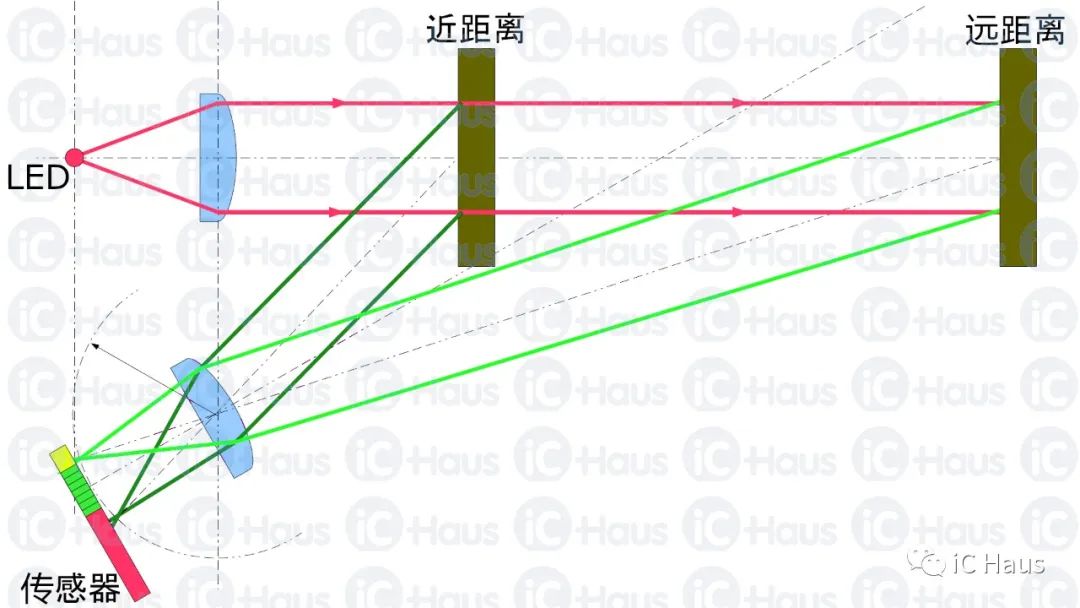
����ͼ��ʾ�������������Ϸ��䲢���ﴫ����ʱ������ľ��뽫�����������ﴫ�����ϵ�λ�á��ı�����ı䱻�����Ĵ�������λ�ã����Ϊ����ȷ�������룬������Ҫһ�����Թ�ѧ��������
���Թ�ѧ������ͨ���� PSD��Position Sensitive Detector: λ������̽�������� CMOS���� CCD���������С�������������һά���ά�ģ������ھ����������ڼ�⣬ֻ��Ҫһά�����Ľ��������������
PSD ͨ���ṩ����ģ������źţ����DZ�ʾ���յ��Ĺ���һ���������һ�������ϵ�ƽ�⣨�ֲ�����
���Զ���Щ�źŽ��д������Ա�����ʶ������Ƿ�ij��λ�á���ʹ�� PSD �����ھ��п�����������Dz�������������������ˮ��ͷ���ſ�/��ϵͳ������в�����������Ʒ���Զ��������ߵȡ�
Ҳ����ʹ�� PSD ������룬�������������û�еõ��ܺõĿ��ƣ����ȿ��ܻή�͡�
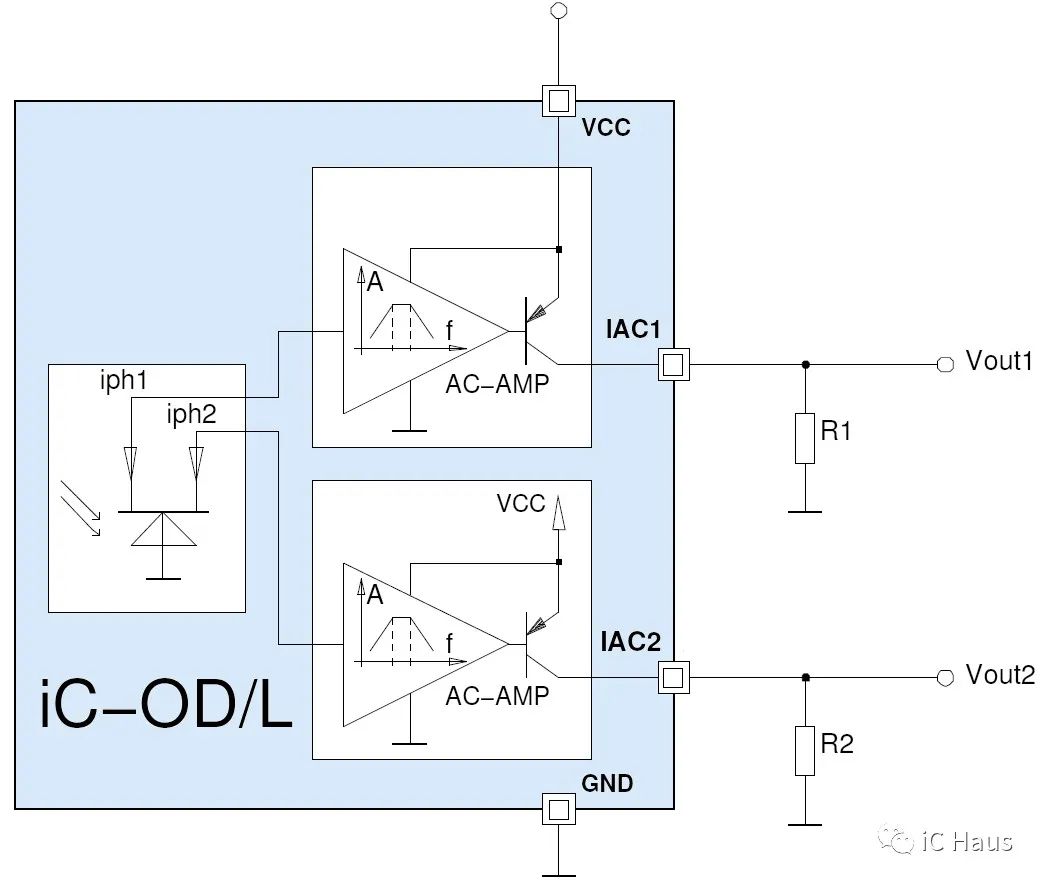
iC-OD �� iC-ODL �� iC-Haus �Ĵ���Ӧ����ʹ�� PSD �ĺܺ�ʾ����iC-OD(L) ���м��ɷŴ����Ը����źŴ�������������һ����ͨ�˲�������ȥ����Ƶ������ͬʱ���Ʊ�����������������Ҫ�Ĺ�Դ��Ӱ�졣
ͨ�������Ƚϸߵ�Ӧ�ø�ϲ��ʹ�� CCD �� CMOS �������У���Ϊ���Խ��в�ͬ���͵��źŴ����ʹﵽ���ߵľ��ȡ�
��Щ����������ͼ��������˿��Ե�����ȡÿ�����صĹ�ǿ��Ϣ������Ҫ���źſ�����оƬ�ϴ������͵��ⲿ MCU/DSP/CPU�����߱����Ϊ����������Ϣ��������ֵ������롢���ڵȣ���
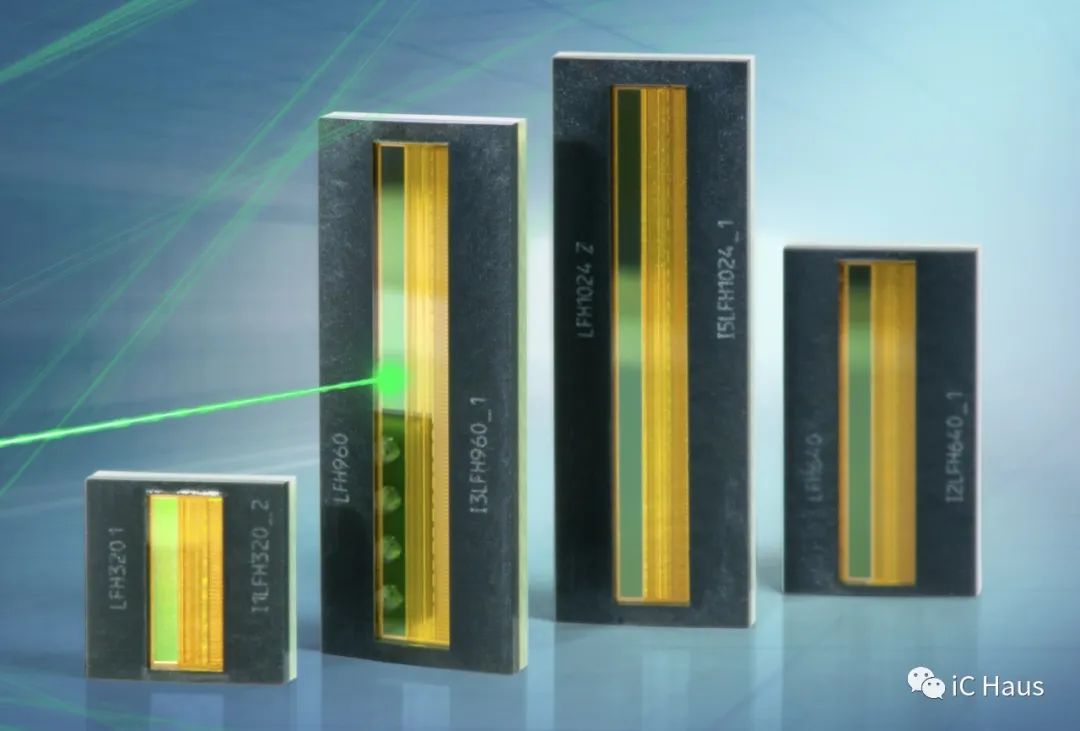
iC-Haus �� iC-LF ϵ�к� iC-LFH ϵ�ж��� CMOS ����ͼ���������ǵij��ȣ����������������ܶȣ�iC-LFH ϵ���е��ܶȸ��ߣ���ͬ��
����������صĽ��չ�ǿ�ȳɱ�����ģ���ѹ����-��ѹת����һ��ʱ���ڻ��֣�����ʹ��ʱ���źŴ���������Բ�ͬ���صĵ�ѹ��
��Щ������оƬ���м����źŷŴ��������ṩ���Ź��ܣ�������ϵͳ���ƻ���ʱ�䡣
���� iC-LF(H) ϵ�еľ�ȷ��ǿ�źű����͵� A/D ת�������ⲿ MCU/DSP/CPU �е��㷨���Դ����������ݲ��Լ��ߵľ���ִ�и��ӵļ��㡣�ⷽ�������ھ��ܾ�������豸�����������Ȳ���������ƽ��Ȳ����ȡ�
���ھ������ֿ�/������Ľ��������Dz������������iC-Haus �ṩ�˹�����ȫ�� iC-LO ������оƬ��iC-LO �������������Dz������ܣ���ͨ���������ã����磺ͨ���ͳɱ� MCU �� SPIͨ�ţ��ṩ�˸߶ȵ�����ԡ�
�����ص��ǣ�
129 ��������
����Ƭ�ϵ��ӳ��źŴ����Լ������Ĵ���/������
���ֿ�/�����
�����õ��л����루�˾��������κ����嶼�ᴥ��������أ�
���⾯��
����������
���� LED ����������ʹ�øߴ� 1A ����������ֱ��������Դ������������Դ��Ӱ�죬�������幦���Դﵽ���ߵľ��룩��
ƾ�����ּ��ɶȣ��ⲿ��·�� MCU ��̴��������˲�Ʒ����������˿ɿ��ԡ�
�������ȡ����ϵͳ�ĸ������֣����õĽ���������õ��źŴ����㷨������Щ�㷨��Ҫ�ṩȷ���źţ�����Ҫ���õĹ�ѧ������������ѧ������ֻ���ڽ��յ����ʵĹ�ʱ�Ż�������õ�����źţ����ںܴ�̶���ȡ���ڹ�Դ����������ʹ�õĹ�ѧ����
